Платформы SIMOTION предоставляют гибкое решение – для всех требований. Каждая аппаратная платформа имеет
свои преимущества в зависимости от конкретного приложения. Различные аппаратные платформы могут легко
соединяться между собой, что дает преимущество при использовании в модульных станках или на заводах. Это
объясняется тем, что индивидуальные аппаратные платформы всегда имеют одинаковые системные
характеристики, а именно, функциональность и среда разработки всегда идентичны независимо от
используемой платформы.
SIMOTION C
SIMOTION C – на базе контроллера
SIMOTION C – это контроллер с функциями управления движением в конструктивном исполнении SIMATIC
S7-300. Линейка SIMOTION С состоит из:
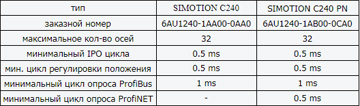
Управление приводами и другими компонентами по сети PROFIBUS осуществляется с помощью 2-х
интерфейсов PROFIBUS, которые могут работать такт-синхронно с равным DP тактом и со скоростью
передачи данных. HMI или ПК со SCOUT, так же могут интегрироваться в систему с помощью PROFIBUS.
SIMOTION C может оснащаться дополнительными модулями периферии из линейки ET 200M.
Преимущества:
Гибкость – за счет использования линейки устройств SIMATIC S7, что оптимально подходит для задач
автоматизации
Универсальность управления приводом – за счет возможности управления цифровыми, аналоговыми и
шаговыми двигателямии
Простота – за счет знакомой и дружественной пользователю конструкции.
Область применения:
Благодаря своему конструктиву SIMOTION C максимально гибок в своей конфигурации
Задачи с большим количеством входных и выходных сигналов.
SIMOTION D
SIMOTION D – на базе привода
SIMOTION D – это вариант Motion Control Systems на базе привода семейства SINAMICS. Линейка
контроллеров SIMOTION D сочетает в себе два устройства: контроллер и модуль управления приводом
SINAMICS S120. На базе такой техники совокупная система становится очень компактной и быстрой.
Линейка SIMOTION D начинается с одноосевого D410 и заканчивая 128-ю осевым D455-2 DP/PN.
Линейка SIMOTION D:
6AU1410-2AA00-0AA0
6AU1410-2AD00-0AA0
6AU1425-0AA00-0AA0
6AU1425-2AD00-0AA0
6AU1435-2AA00-0AA0
6AU1435-2AD00-0AA0
6AU1445-2AD00-0AA0
6AU1455-2AD00-0AA0
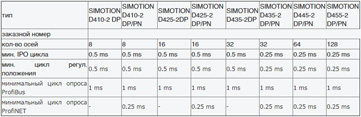
Область применения этих систем варьируется от простых одноосевых машины до сложных многоосевых
агрегатов и производственных линий. В зависимости от версии SIMOTION D имеет 2 встроенных
интерфейса PROFIBUS, поддерживающих профиль PROFIdrive, один или два интерфейса Industrial
Ethernet и один интерфейс PROFINET.
Преимущества:
Область применения этих систем варьируется от простых одноосевых машины до сложных многоосевых
агрегатов и производственных линий. В зависимости от версии SIMOTION D имеет 2 встроенных
интерфейса PROFIBUS, поддерживающих профиль PROFIdrive, один или два интерфейса Industrial
Ethernet и один интерфейс PROFINET.
Область применения:
Компактные машины,
Машины с децентрализованной структурой управления, в частности с многоосевым управлением,
Машины построенные по модульному принципу, например, как дополнение к Simotion P или к Simotion
C,
Задачи с высокими требованиями по синхронизации осей
Задачи с высокими требованиями по точности систем позиционирования
SIMOTION p
SIMOTION P – на основе ПК
SIMOTION P – это система управления движением на базе персонального компьютера. На этом ПК
одновременно работают и функции Motion Control – и функции HMI. Более того, в данном контроллере
могут обрабатываться специализированные программы, написанные на платформе ПК. Для SIMOTION P
можно использовать несколько вариантов панели визуализации: размеры 12 или 15 дюймов, различных
типов: сенсорные панели или с мембранными кнопками.
Серия контроллеров SIMOTION P выпускается в двух исполнениях:
SIMOTION P320 - выпускается в конструктиве промышленного ПК microbox без единой движущейся части
SIMOTION P350 - в классическом исполнении промышленного контроллера. Контроллер имеет два
интерфейса PROFIBUS и PROFINET для коммуникаций с приводами, распределенной периферией и любыми
другими устройствами.
Преимущества:
Вычислительная мощность за счет использования высокопроизводительного процессора
Надежная работа даже в самых жестких условиях, за счет использования специальных аппаратных
компонентов, пригодных к промышленной среде
Открытая архитектура, за счет доступности стандартных приложений на базе Windows.
Область применения:
Крупные многоосевые задачи,
Задачи, требующие малые времена опроса,
Кроссплатформенные решения.